북한이 다양한 제조 공정에 활용되는 델타형 병렬 로봇에 대한 연구를 진행하고 있는 것으로 알려졌다.
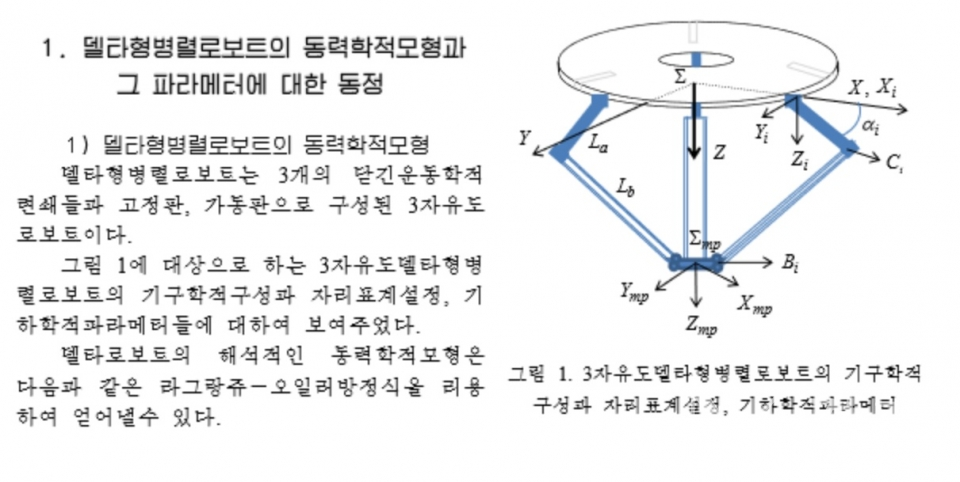
1월 13일 대북 소식통에 따르면 김일성종합대학이 발행한 김일성종합대학학보 정보과학 2020년 제66권 제3호에 '3자 유도 델타형 병렬 로봇의 동력학적 모형에 대한 파라메터 동정'이라는 논문이 수록됐다. 여기서 동정은 Identification 즉 확인, 증명을 뜻한다. 즉 델타형 병렬 로봇의 동력학적 모형을 증명했다는 것이다.
논문은 "전통적인 직렬 로봇에 비해 병렬 로봇이 세기 대 중량비가 높고 동작 속도가 빠르며 환경 적응 능력이 강하고 투자 대비 성능이 높은 것 등 많은 장점들을 가지고 있어 세계적으로 광범히 하게 연구 도입되고 있다"고 설명했다.
논문은 "특히 전자공업과 경공업, 식료공업, 의약품공업 등 여러 부문에서는 제품의 조립, 포장, 선별 등과 같이 다량의 고속 및 반복조작이 필요할 때 이런 생산공정들의 자동화, 지능화, 무인화를 실현하는데 델타형 병렬 로봇의 고속 및 정밀조종체계의 개발이 필수적인 수단으로 되고 있다"고 밝혔다.
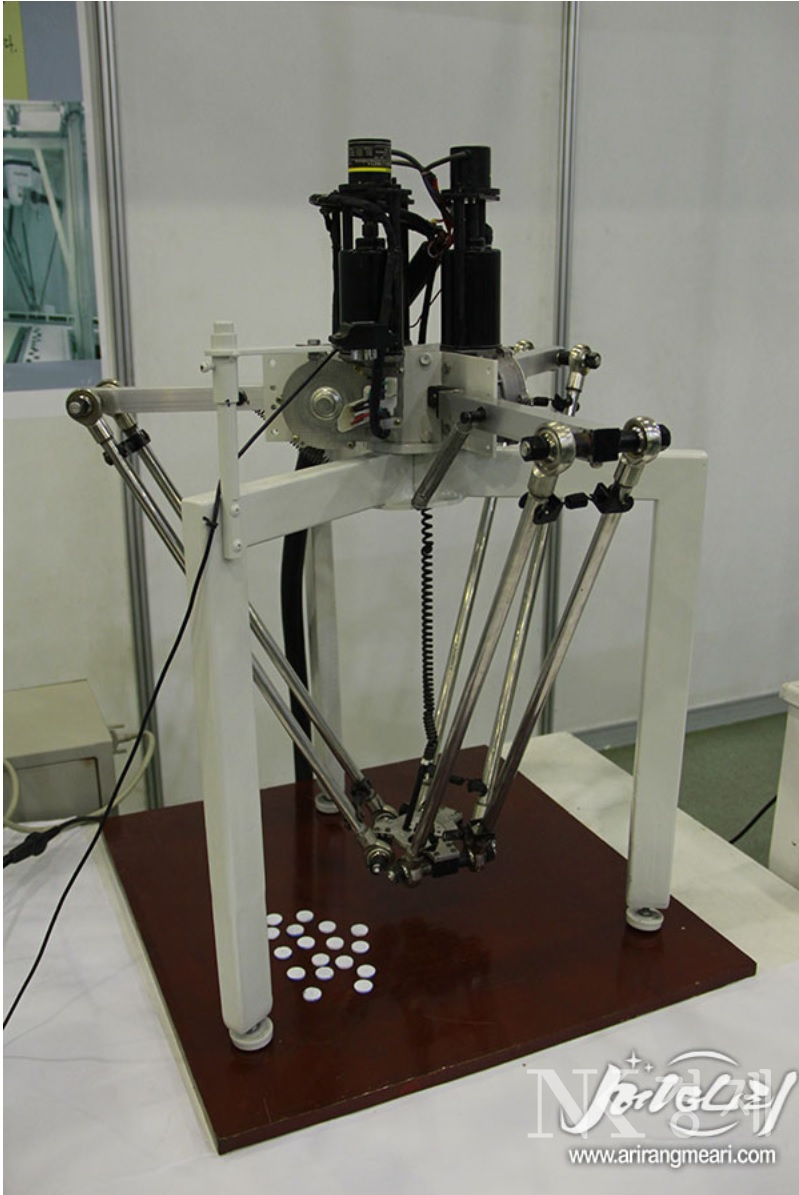
델타형 병렬 로봇은 그림, 사진에서 볼 수 있듯이 여러 개의 팔이 몰려있는 형태를 띄고 있다.
논문은 이런 조종체계를 설계하기 위한 선결조건이 대상의 동력학적 모형을 정확히 증명하는 것이라고 설명했다. 선행연구에서는 델타형 병렬 로봇의 운동학적 모형과 동력학적 모형을 얻어내고 그것의 파라메터들은 측정의 방법으로 근사적으로 결정했으며 대상의 모형 파라메터를 정확히 추정하기 위한 구체적인 방법에 대해 고찰하지는 못했다고 한다.
동력학적 모형을 증명한다는 것은 단순히 해외에서 델타형 병렬 로봇을 가져오거나 복제하는 것이 아니라 델타형 병렬 로봇 기술을 자신들의 것으로 만들기 위해 연구하고 있다고 볼 수 있다.
논문은 결론에서 3자 유도 델타형 병렬 로봇의 해석적 동력학 모형을 회귀모형구조로 변환하고 MSC- ADAMS/MATLAB 협동 모의모형의 입출력측정 자료에 축차 최소 2제곱(RLS) 알고리즘을 적용해 로봇의 동력학적 모형의 파라메터를 증명하고 그 결과를 검증했다고 설명했다.
강진규 기자 maddog@nkeconomy.com
* 독자님들의 뉴스레터 신청(<-여기를 눌러 주세요)이 NK경제에 큰 힘이 됩니다. 많은 신청 부탁드립니다.